7月5日,作为百度Apollo计划硬件开发平台合作伙伴,章红平总经理代表迈普时空参加百度智能驾驶论坛并在14:00-18:00的Apollo合作硬件公开课上作“北斗惯导定位智能驾驶新时代”的专题报告。

章红平先生现为武汉大学教授、博士生导师,同时任职于武汉大学卫星导航技术研究中心,曾兼任全球华人定位导航协会(CPGPS)秘书长、中国第二代卫星导航系统专项专家组成员、中国卫星导航年会CSNC副秘书长、委员等。章红平教授在北斗卫星导航系统及应用、卫星导航理论、定位算法、GNSS基带芯片、导航终端研制、GNSS/INS组合导航等方面具有多年的积累和深刻理解,主要研究成果包括GNSS电离层延迟反演、北斗/INS精密定位定姿研究、北斗系统性能评估等,近5年来累计发表论文40余篇,其中SCI论文13篇,申请软件著作权5项,专利3项,国家科学技术进步奖1项。
章红平先生的专题报告介绍了武汉迈普时空导航科技有限公司以及母公司北京耐威科技有限公司的基本情况,迈普时空具备“惯性+卫星+组合”全覆盖的全产业链自主研发生产能力,并依托母公司耐威科技进行产业链全面布局,正致力于成为全球定位定姿解决方案的先进企业。迈普时空依靠武汉大学卫星导航定位技术研究中心,由中国工程院院士、“千人计划”、“长江学者”、海外归国共5位专家联合创立,目前申请了十余项专利,注册软件10套,其中,拥有自主知识产权的“高精度定位定姿数据处理技术”、“精密轨道测量技术”、“自动驾驶精密定位定姿终端”等技术已在全国二十多个城市开展了有效服务。
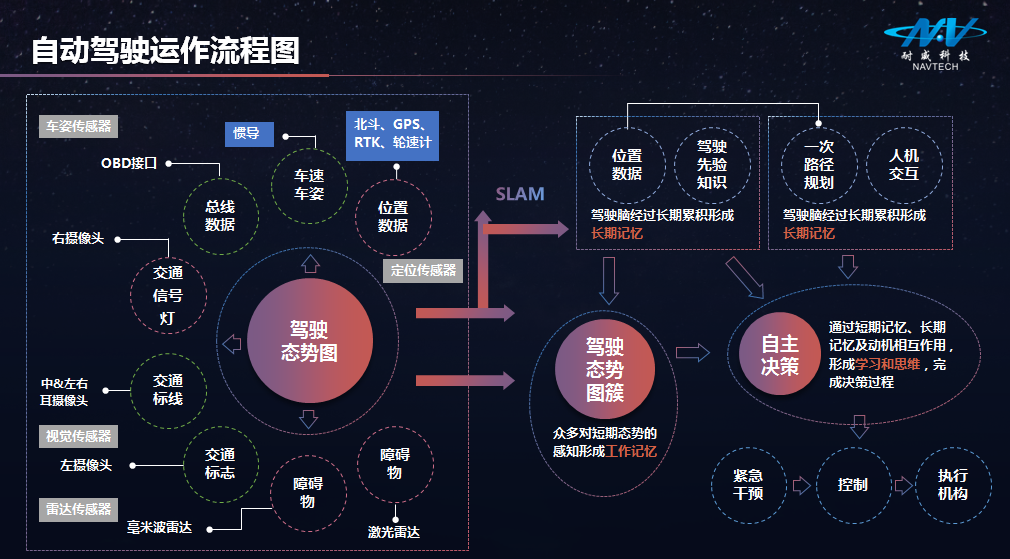
关于北斗+惯导在自动驾驶中的作用,章红平先生详细介绍了“自动驾驶运作流程图”、“北斗精密定位服务系统”、“惯性导航系统”、“GNSS+INS组合导航优势”、“自动驾驶传感需求”、“自动驾驶高精度定位定姿需求”、“自动驾驶决策需求”、“自动驾驶控制需求”、“自动驾驶导航需求”及“高精度众包地图的基石”。

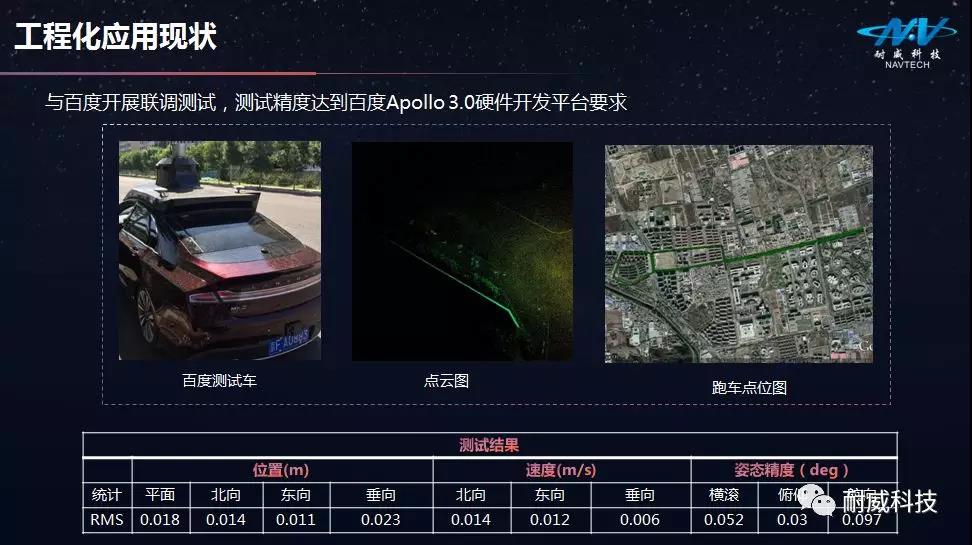
关于迈普时空自动驾驶定位定姿产品及产品发展规划,章红平先生详细介绍了迈普时空的围绕组合导航及车辆传感器的整体产品布局,介绍了自动驾驶高精度定位定姿三代产品的研发过程与进度,讲解了GNSS双天线光纤陀螺定位定姿系统POS320及小型MEMS陀螺定位定姿系统NV-GI120;同时重点讲解了自主开发的自动驾驶精密定位定姿软件(包括数据后处理软件及实时处理软件)以及相关工程化应用实践。

关于迈普时空下一代产品的规划,章红平先生介绍了“GNSS+惯导+视觉组合定位定姿系统”的应用优势、构成框架、测试效果及系统误差,迈普时空拟结合软硬件技术发展趋势,不断迭代更新现有产品,为自动驾驶提供连续稳定可靠的高精度定位定姿解决方案。